
|
4 – MONTANDO UMA MÁQUINA
Não adianta querer começar a aprender “programar” uma automação. Primeiro você precisa ter um objetivo ... e uma “máquina” em mente.
Então proponho um objetivo: construir um carrinho que ande para frente, para trás, e desvie quando colide com a parede.
Então? O que você precisa saber antes?
- Como um carro muda de direção.
- Como será comandado o motor.
- Como fazer o motor dirigir para frente e para trás.
- Como ele vai “sentir” que bateu na parede.
Com este exemplo teremos a iniciação básica de uma máquina comandada por um Arduino. Muitas outras coisas serão vistas no caminho. O que queremos é:
1- Andar para frente.
2- “Sentir” uma colisão.
3- Identificar o lado da colisão (esquerdo ou direito).
4- Afastar um pouquinho do obstáculo.
5- Girar na direção contrária ao obstáculo.
6- Andar para frente novamente.
Primeiro temos que conhecer a “mecânica” do deslocamento de um carro.
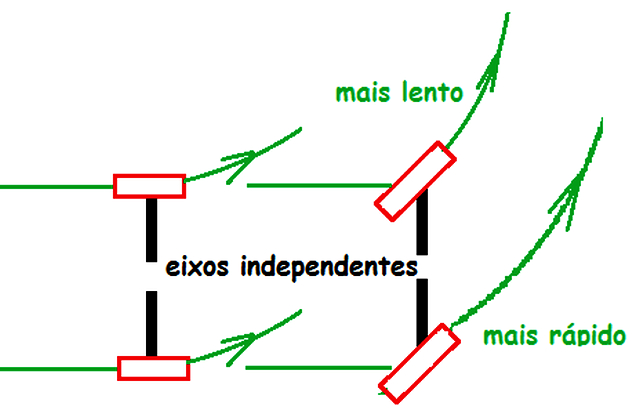
Para mudar de direção viramos as rodas e ele desvia no sentido que foram viradas. Observe que as rodas de fora vão girar com velocidade maior que as de dentro. Então não pode ter um eixo direto de uma para outra, como nos brinquedinhos para crianças. Isso exige uma mecânica de mudança de direção mais complicada, inviável num carro automatizado de combate dos campeonatos existentes.
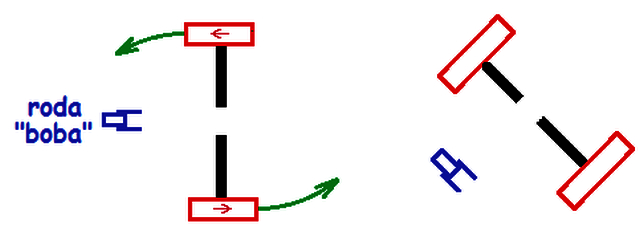
Outra maneira de girar o veículo é parando uma roda e mantendo a outra acionada. Ou ainda girar uma roda para trás e a outra para frente. Isso fará um giro muito rápido no mesmo lugar. Um exemplo disto são os tratores de esteira ou tanques de guerra. Mas, fazendo assim, as rodas de trás irão arrastar e frear o movimento. Isto é resolvido colocando apenas duas rodas motrizes e uma terceira tipo “boba”, como nos carrinhos de supermercado. Isto facilita muito a construção e controle do veículo (mas não é prática para transporte de passageiros pois o equilíbrio é ruim.
Usaremos este sistema para nosso carrinho. E os motores serão elétricos, do tipo “com escovas”.
O MOTOR ESCOVADO
Como dissemos, o motor consiste em um eletroímã (uma bobina com fio) presa em um eixo e dois ímãs fixos. As forças de repulsão e atração magnéticas farão a bobina e o eixo girarem, produzindo movimento até as forças se alinharem. Após meia volta deve-se inverter o sentido da corrente para que o eletroímã inverta a polaridade, provocando novamente as forças de atração e repulsão sobre os ímãs.
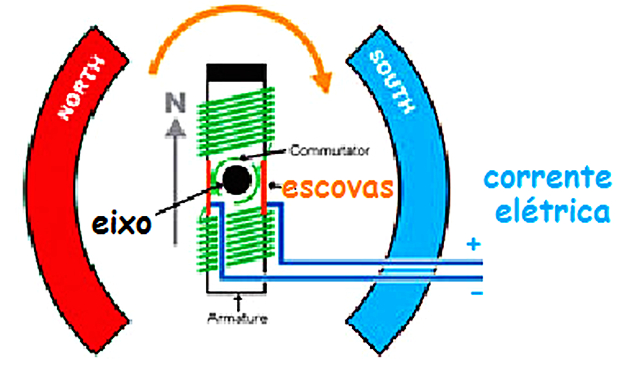
A troca de polaridade é feita através de contatos (escovas) sobre um coletor ligado à bobina.
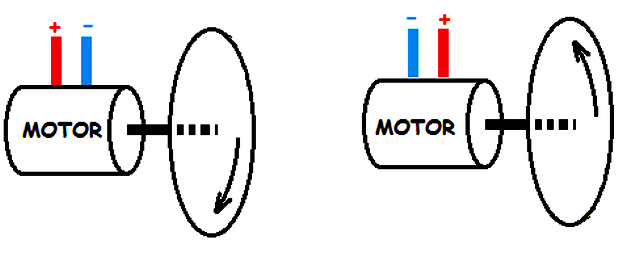
Podemos inverter o sentido de rotação do motor se invertermos o sentido da corrente elétrica aplicada a ele. Assim é que faremos o carro andar para frente e para trás. Cuidado que, na montagem dos carros, os motores ficarão “espelhados” e os giros devem ser inversos (veremos mais adiante).
Para nosso carro devem ser usados motores com “caixa de redução”, um conjunto de engrenagens que diminuem a velocidade de rotação do motor e aumentam sua força para arrastar o peso colocado.
OS SENSORES DE COLISÃO
Consiste numa chave de 3 polos, onde um deles está normalmente fechado (NC – normaly closed) com o centro e o outro normalmente aberto (NO – normaly open). Ao ser acionada o polo aberto irá fechar e o fechado irá abrir. Basta conectarmos o positivo da corrente num polo e o negativo no outro. O centro irá alternar entre (+) e (-) conforme há colisão contra a parede e a chave é acionada. É conhecido como "fim de curso".
Usaremos dois destes sensores, um do lado esquerdo e outro do lado direito. Deste modo nosso “programa de automação” irá “saber” se a colisão foi à direita ou à esquerda e decidir para onde desviar, girando um dos motores num sentido e o outro em sentido contrário.
Ainda precisamos de uma placa com o microcontrolador (Arduino), baterias (preferível com tensão acima de 7,4 V) e um drive de potência para acionar os motores.
Credo!!!! O que é isso?
Como o Arduino fornece pouca corrente elétrica nos seus pinos (40 mA ou 0,040A) ele não pode acionar o motor. Precisamos uma maneira de transferir corrente diretamente da bateria para eles. Podemos conduzir esta energia usando reles, de contatos acionados por eletroímãs ou por um transistor de potência.
No primeiro caso não podemos controlar a energia fornecida e o motor sempre gira na rotação máxima. No segundo caso podemos controlar a energia e a velocidade dos motores.
Além disso, este tal de “drive” deve possibilitar a inversão da corrente para mudar o sentido de giro dos motores.
A PONTE “H”
É um sistema de 4 chaves, acionadas duas a duas, que ligam os terminais do motor à bateria, invertendo os pólos se necessário. Acompanhe no diagrama.
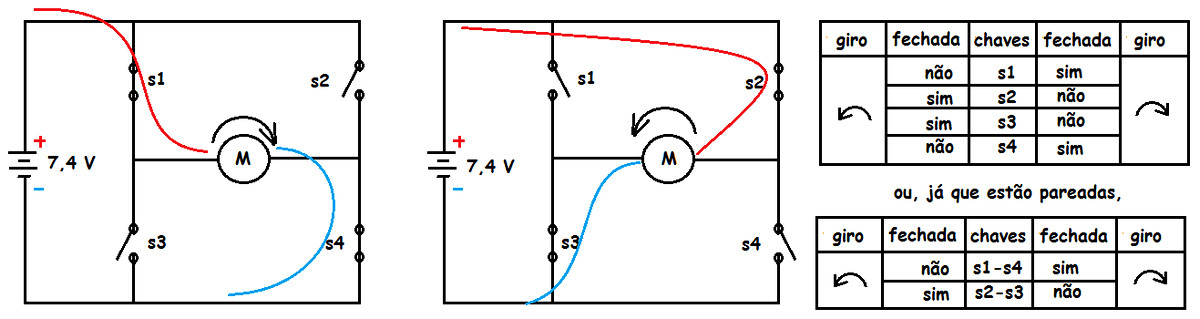
Neste exemplo temos uma chave feita com relês que admitem a situação aberto ou fechado. Relês pode permitir a passagem de correntes gigantescas para motores muito potentes. Mas existem relês de estado sólido, feitos com tecnologia do silício, sem partes móveis, que também podem conduzir grandes correntes. No nosso caso podemos usar transistores para o mesmo fim.
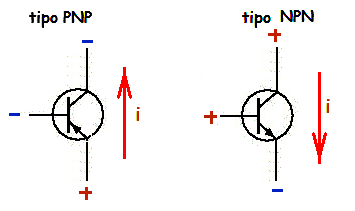
O TRANSISTOR
É um componente que permite a passagem da corrente de um polo (o coletor) para outro (o emissor) mediante uma “porta” (a base). Regulando a tensão nesta base, a “porta” fica fechada, abrindo aos poucos até ficar aberta. Assim podemos controlar o fluxo da corrente que alimenta o motor e, consequentemente, sua velocidade.
Existem dois tipos: NPN onde aplicamos uma polaridade positiva à base para “abrir a porta”, e o tipo PNP, onde aplicamos uma polaridade negativa à base para “abrir a porta”.
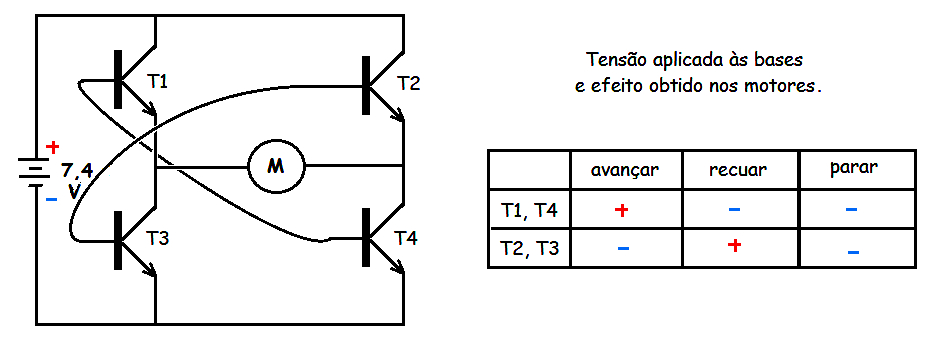
As chaves dos sensores de colisão informam o microcontrolador que, conforme nossa programação, irá decidir o que “pedir” a ponte para controlar os motores. Acompanhe o diagrama.
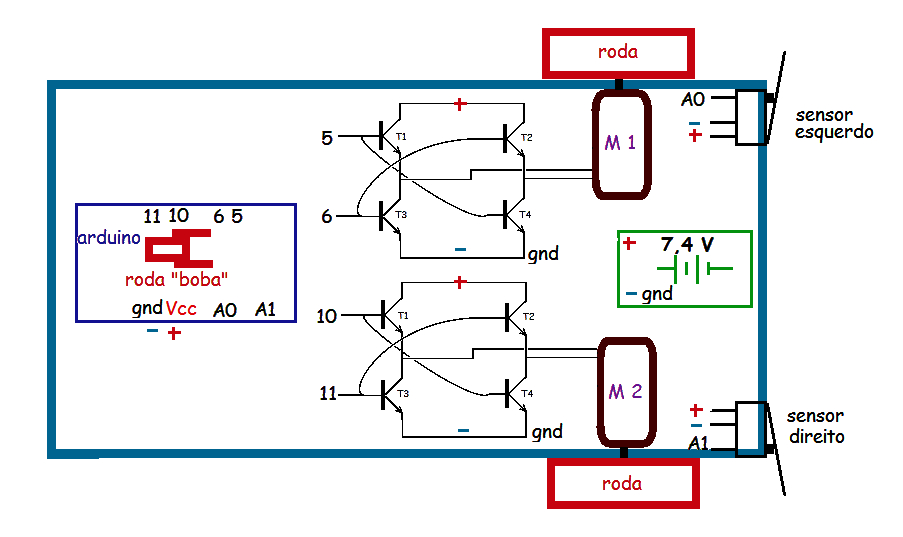
A ponte H com transistores você deve consultar na internet como fazer, ou, existem “shield’s” para o Arduino com tais pontes já prontas, que podem ser encaixadas sobre sua placa.
Agora podemos montar o chassi de nosso carro.
Finalmente! Vamos fazer a parte da programação do microcontrolador.
Voltar: 3-eletricidade e magnetismo
Próxima: 5-conversando com o arduino
Início do arduino
contato: clpires13@gmail.com