|
11 – PONTE "H"
Vamos dizer que uma ponte "H" é um "atuador" que inverte a polaridade da tensão aplicada a alguma coisa. Se "esta coisa for um motor de corrente contínua escovado podemos inverter seu sentido de rotação. Isto já foi visto nos capítulos "3 – Eletricidade e Magnetismo" e "4 – Montando a Máquina", assim como veremos motores mais adiante.
Existem várias maneiras de se fazer uma ponte "H": com chaves manuais, com relês, com transistores ou com circuitos integrados próprios para isso (chamados drives de potência).
USANDO CHAVES OU RELÊS
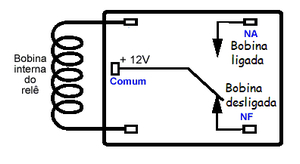
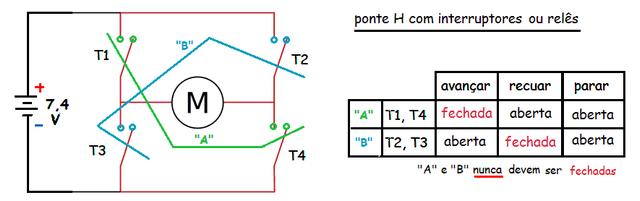
Abaixo temos um exemplo de uma montagem utilizado contatos mecânicos, sejam manuais ou com relês. Um relê é um eletroímã que, quando energizado, fecha contatos entre um terminal central e outro que normalmente estaria aberto (NA). Muitos relês mantém o pino central ligado a outro normalmente fechado (NF) até que a bobina seja energizada.
O acionamento da bobina pode vir de um contato ou do próprio Arduino. Neste caso, cuidado com os limites de corrente necessários para acionar a bobina, Existem relês que funcionam bem com os 40 miliamperes dos pinos dele. Mesmo assim, observe bem quando usa vários relês simultaneamente.
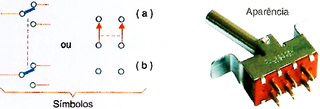
Antes de continuar, resolva o seguinte desafio:
- desenhe as ligações de uma ponte "H" usando apenas uma chave inversora de 6 pólos, como vista ao lado.
USANDO TRANSISTORES
Como já vimos antes, existem vários tipos de transistores como PNP ou NPN, assim como os limites de corrente que eles conseguem passar entre coletor e emissor. Se a corrente é grande, certamente será necessário um dissipador de calor neste transistor.
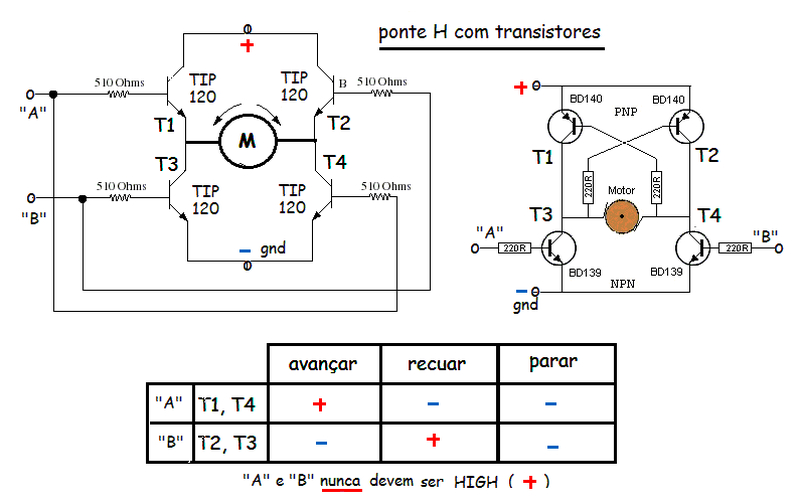
Temos abaixo várias montagens de ponte "H" com transistores. Cuidado especial quando o programa de automação aciona as portas da ponte, Pode ocorrer um curto circuito na bateria, queimar os transistores, derreter os fios ou provocar um incêndio na sua casa!
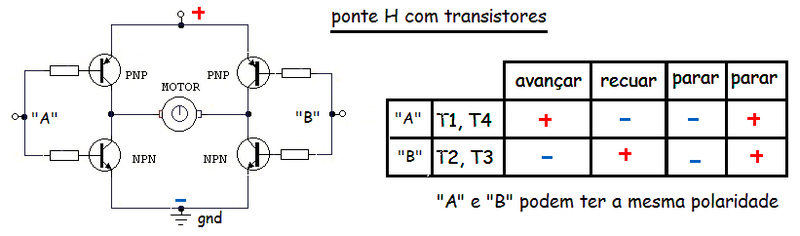
Outra montagem, usando transistores PNP e NPN, onde há maior segurança pois não importa se as portas "A" e "B" forem polarizadas com a mesma tensão: o motor para.
Para as montagens que estamos sugerindo procure usar uma placa "protoboard" que facilita as montagens experimentais.
Esta placa e outros componentes são facilmente encontrados nas lojas que revendem componentes. Pode ainda usar as compras pela internet, mas faça grandes "pacotes" pois geralmente o frete para envio é muuuuito mais caro que o componente. Eu, pessoalmente, costumo usar a robocore.net que tem boa variedade, principalmente no que se refere a sensores, motores, componentes, placas de Arduino ou similares, além de ser próxima a minha casa.
USANDO CIRCUITOS INTEGRADOS
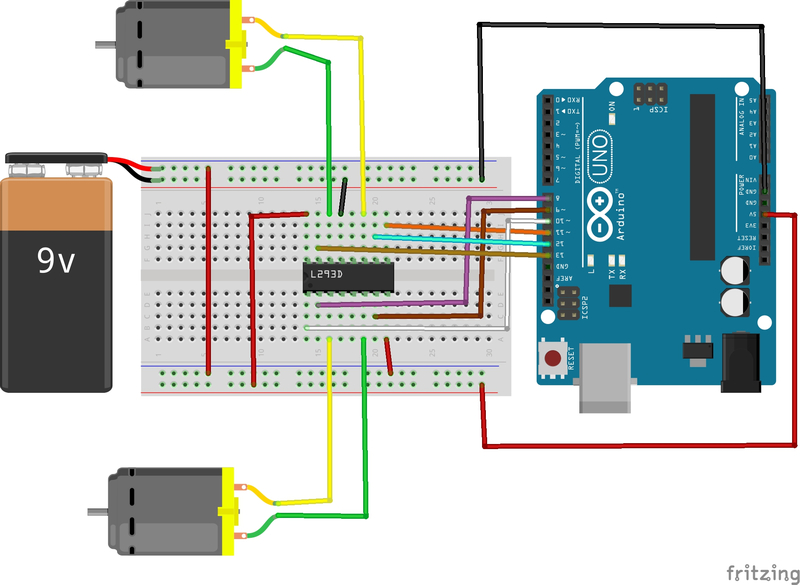
Existem muitos CI (circuitos integrados) ou drives de saída. Vou dar exemplo usando um deles, mas você pode consultar a vasta variedade existente na internet. Trata-se do L293D, de 16 pinos, que possui DUAS pontes H (esquerda e direita) e administra corrente de até 600 mA (ou 0,600 A) por canal. Isso é suficiente para acionar os diversos motores pequenos usados em nossas experiências, como motores de brinquedos.
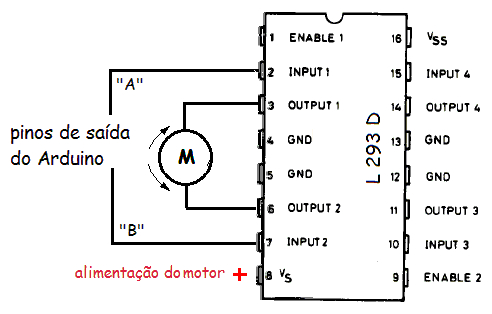
Cada uma das pontes possui um pino (1 e 9) de "enable" que, se for colocado em LOW (-), "desliga" a ponte. Os pinos 3 e 6 são as saídas (output) de um dos motores, enquanto os pinos 11 e 14 são do outro motor.
As portas que chamamos de "A" e "B" são os pinos 2 e 7 (input) de uma das pontes e a outra são os pinos 10 e 15. Se no funcionamento final os motores não estiverem girando no sentido desejado basta inverter os pinos 3/6 ou 11/14 dos "output", como já vimos em capítulos anteriores.
O pino 8, "Vs", é a alimentação dos motores, e tem um limite máximo de 36 V (cuidado com os limites de corrent
e e dissipação do CI).
O pino 16, "Vss", é a a alimentação do circuito lógico do CI. Apesar do manual dizer que tem limite de 36 V também, use os 5 V do Arduino.
Analise e compare as ligações do exemplo abaixo. Nele os "enables" estão sendo ativados pelos pinos 8 e 11 do Arduino.